平衡点
微分方程式における平衡点(へいこうてん)とは、独立変数に依らず一定の値となる常微分方程式の解である。同じものは不動点、固定点、臨界点、休止点、特異点、停留点、静止点、危点、平衡解、定常解、定数解、静止解などの名でも呼ばれる[2]。英語では equilibrium point, fixed point, stationary solution, critical point, rest point などと呼ばれる[3]。力学系的視点では、平衡点とは時間が変化しても動かない相空間上の点を意味する。

平衡点は、微分方程式の解を理解する上で重要で、平衡点を調べることは、微分方程式の解の定性的な振る舞いを知りたいときの最初の手段である。問題の微分方程式が非線形系の場合、解析的な解が得られることはまれだが、非線形系であっても平衡点を求めることなら可能である。
数式では、微分方程式 dx/dt = f(x) において f(xe) = 0 を満たす xe が平衡点である。線形系あるいは線形近似された系の平衡点は、係数行列の固有値によって、平衡点近傍の解軌道が近づくか離れるかといった安定性の問題を判別できる。ハートマン・グロブマンの定理により、平衡点が双曲型平衡点であれば、非線形系の平衡点近傍の振る舞いと線形近似した系の平衡点近傍の振る舞いが、定性的に同じであることが保証されている。
定義と一般的性質
編集微分方程式の独立変数を t ∈ R とし、従属変数を x ∈ Rn とする。このとき、dx/dt が次のような t を陽に含まない自励的な常微分方程式で与えられているとする[4]。

ここで、




であり、右肩の ⊤ は転置行列を意味する[5]。もし従属変数の定義域を Rnの適当な開部分集合 U で考えても一般性は失われない[6]。
上記の微分方程式に対して xe ∈ Rn が

を満たすとき、xe を平衡点などと呼ぶ[7]。一方で、

を満たす x ≠ xe を通常点などと呼ぶ[8]。
微分方程式の定義域 Rn や U を力学系では相空間と呼ぶ[9]。力学系では、独立変数 t はしばしば時間とみなす[6]。力学系的視点では、平衡点とは時間が変化しても動かない相空間上の点を意味する[10]。微分方程式の解は相空間上で曲線を描くので、これを解軌道などと呼ぶ[11]。平衡点も1つの解軌道である[3]。f が一般的な滑らかな関数であれば、微分方程式の解の存在と一意性の要請のため、平衡点以外の解軌道が有限時間以内に平衡点に到達することはない[12]。ただし、後述のように t → ∞ で平衡点に収束する解軌道はあり得る。
どれだけ時間変化しても解軌道が相空間上のある集合から出ない場合、その集合を不変集合という[13]。平衡点はもっとも単純な閉不変集合である[14]。またさらに、閉不変集合 M の部分集合で閉不変集合であるのは M と空集合だけであるとき、M を極小集合という[15]。平衡点は極小集合でもある[15]。
平衡点の計算例
編集
f(xe) = 0 が代数的に解けるときは、平衡点 xe を式で書き表すことができる[16]。例えば、

という微分方程式系であれば、

という連立方程式を解くことにより、(x, y) = (1, 1) と (x, y) = (0, 0) の2点がこの微分方程式系の平衡点であることが分かる[17]。
方程式の係数が変数で与えられているような例としては、次のローレンツ方程式を挙げる[18]。

ここで、σ, r, b は t に依存しない定数(パラメータ)である。ローレンツ方程式の1つの平衡点は

で、この原点の平衡点はパラメータの値に依存せずに常に存在する[19]。さらに r > 1, b > 0 の条件下で、原点の平衡点 に加え、次の2つの平衡点が存在する[19]。


平衡点近傍における解軌道の振る舞い、安定性判別
編集平衡点は、微分方程式の解を理解する上で重要な役割を果たす[20]。微分方程式系の解の振る舞いを知りたいとき、最初の取っ掛かりとなるのが平衡点の調査である[21]。相空間の全体での大域的な性質を問題にする場合であっても、平衡点近傍の局所的な性質の解明が基礎となる[22]。平衡点近傍の解軌道の振る舞いを調べ、分類するのが、解軌道の幾何学的構造を理解する第一歩である[23]。
とくに、微分方程式のある解軌道とその近くを通る別の解軌道が、任意の時刻 t においても十分近く同士にあるのか、それとも t → ∞ で離れていくかといったような問題は、安定性の問題と言われ、微分方程式の定性理論においてもっとも基本的な問題である[24]。
安定性の定義
編集

平衡点 xe の十分近くの初期値を取る解が、全ての時刻 t において xe の近くに留まり続けるようなとき、その平衡点をリアプノフ安定であるという[25]。厳密に言うと、平衡点 xe がリアプノフ安定であるとは、 任意の定数 ε が与えられたときにある定数 δ が存在し、 ‖ x(0) − xe ‖ < δ を満たすような任意の解 x(t) ≠ xe が、全ての t で ‖ x(t) − xe ‖ < ε を満たすことをいう[26]。ここで、 ‖ · ‖ は相空間に定義されたノルムを表す。リアプノフ安定であるとき、単に安定であるともいう[27]。
一方、リアプノフ安定とは別の安定性の概念もある[26]。平衡点の近くにある初期点を取る解がその平衡点へ収束するとき、そのような平衡点を吸引的であるという[28]。厳密な定義では、平衡点 xe に対してある定数 δ が存在し、 ‖ x(0) − xe ‖ < δ を満たすような任意の解 x(t) ≠ xe が、t → ∞ のときにx(t) → xe を満たすことを吸引的という[26]。吸引的な平衡点は沈点とも呼ばれる[29]。
さらに、平衡点がリアプノフ安定なおかつ吸引的であるとき、漸近安定であるという[30]。誤解や混乱を生まないようであれば、漸近安定な平衡点を単に「安定な平衡点」と呼ぶこともある[31]。平衡点がリアプノフ安定であるが吸引的ではないときは、とくに中立安定な平衡点という[32]。
平衡点がリアプノフ安定ではないとき、あるいは平衡点がリアプノフ安定でも吸引的でもないとき、不安定であるという[33]。吸引的とは逆に、平衡点近傍の全ての初期値の解が時間経過に従って平衡点から離れるとき、そのような平衡点を反発的であるという[34]。反発的な平衡点は源点とも呼ばれる[29]。
線形系
編集問題が次のような定数係数の線形微分方程式であれば、全ての解を厳密に解くことができる[35]。

ここで、A は次のような定数を各要素とする n 次正方行列である[36]。

この線形微分方程式系の初期値を x0 (t = 0) とすると、一般解は行列の指数関数を使って eAtx0 と表すことができる[37]。このような線形微分方程式系では、A にかかわらず原点 o はつねに平衡点である[38]。
線形微分方程式を解く上で中心的役割を果たすのが固有値と固有ベクトルである[39]。一般に、n 次正方行列 A から導かれる特性方程式

を解くことで、重複も含めて n 個の固有値 λ と固有ベクトル v が得られる[39]。A の固有値 λ の値によって、線形微分方程式系の平衡点 o の安定性は次のように判別できる[40]。
- 全ての固有値の実部が負のとき、平衡点は漸近安定。
- 実部が正の固有値を少なくとも1つ以上含むとき、平衡点は不安定。
- 全ての固有値が実部が負の固有値と純虚数(実部が零)の固有値から成るとき、平衡点は中立安定。
ポアンカレの分類
編集アンリ・ポアンカレは、次のような2次元自励線形微分方程式の平衡点を、平衡点近傍の解軌道の振る舞いにもとづき分類した[41]。

この場合、原点 xe = o が常に平衡点である[42]。この系の係数行列を

とし、A の固有値を λ1 および λ2 とする。 λ1 と λ2 の値によって、平衡点 xe は次のように分類される。
- 平衡点の分類[43]
-
 結節点(安定結節点)
結節点(安定結節点) -
 結節点(安定結節点、スターノード)
結節点(安定結節点、スターノード) -
 結節点(不安定結節点)
結節点(不安定結節点) -
 結節点(不安定結節点、スターノード)
結節点(不安定結節点、スターノード) -
 鞍状点
鞍状点 -
 渦状点(渦状沈点)
渦状点(渦状沈点) -
 渦状点(渦状源点)
渦状点(渦状源点) -
 渦心点
渦心点








- 結節点、あるいはノード(英語: node)
- λ1 と λ2 が同符号の実数である(λ1, λ2 < 0 または λ1, λ2 > 0)場合の平衡点[44]。平衡点が結節点のとき、平衡点の周囲の解軌道は、平衡点に向かって回転せずに単調に近づいていくか離れていくかのいずれかである[45]。λ1 と λ2 の符号が負であれば解軌道は平衡点へ近づいていき、結節点は漸近安定な沈点でもある[46]。この場合は安定結節点や安定ノードと呼ばれる[47]。λ1 と λ2 の符号が正であれば解軌道は平衡点から離れていき、結節点は不安定な源点でもある[46]。この場合は不安定結節点や不安定ノードと呼ばれる[47]。とくに、λ1 = λ2 かつ b = c = 0 であるときは、結節点の周囲の解軌道は結節点を通る放射状の直線群となり、スターノードなどと呼ばれる[48]
- 鞍状点、鞍点、あるいはサドル(英語: saddle)
- λ1 と λ2 が互いに異符号の実数である(λ1 > 0, λ2 < 0 または λ1 < 0, λ2 > 0)場合の平衡点[49]。平衡点が鞍状点のとき、周囲の解軌道には平衡点に向かって近づいていく方向と離れていく方向が同居している[46]。鞍状点の場合、4本の半直線の解軌道が平衡点へ到達する[50]。2本は t → ∞ で鞍状点へ収束し、もう2本は t → −∞ で鞍状点へ収束する[51]。
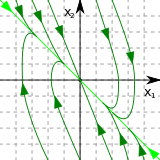
- 渦状点、スパイラル(英語: spiral)、焦点、あるいはフォーカス(英語: focus)
- λ1 と λ2 が互いに共役な実部非零の複素数である(λ1 = α + βi, λ2 = α − βi かつ α ≠ 0)場合の平衡点[52]。平衡点が鞍状点のとき、周囲の解軌道は対数螺旋群となり、平衡点へ回転しながら近づいていくか離れていくかのいずれかである[53]。固有値実部 (α) の符号が負であれば解軌道は平衡点へ近づいていき、渦状点は漸近安定な沈点でもある[54]。この場合は渦状沈点、安定スパイラル、安定焦点と呼ばれる[55]。固有値実部 (α) の符号が正であれば解軌道は平衡点から離れていき、渦状点は不安定な源点でもある[54]。この場合は渦状源点、不安定スパイラル、不安定焦点と呼ばれる[55]。
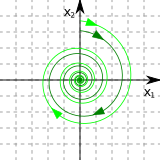
- 渦心点、あるいはセンター(英語: center)
- λ1 と λ2 が互いに共役な純虚数である(λ1 = βi, λ2 = −βi)場合の平衡点[56]。平衡点が渦心点のとき、周囲の解軌道は平衡点を中心とする円(閉曲線)群である[57]。周囲の解軌道は吸引されることも反発することもなく、渦心点は中立安定な平衡点である[58]。

また、A の行列式を q = det A とし、A のトレースを p = tr A とする。これらは


というように各係数あるいは各固有値で表される[60]。したがって、これらの q と p の値によっても平衡点の定性的分類を行うことができ、結節点、鞍状点、渦状点、渦心点の判別は次のようになる[61]。
- q < 0 であれば、平衡点は鞍状点
- q > 0 でかつ
- p2 > 4q であれば、平衡点は結節点
- p2 < 4q かつ p ≠ 0 であれば、平衡点は渦状点
- p = 0 であれば、平衡点は渦心点
以上のような平衡点の定性的分類を p と q を軸とする pq-平面に書き込むと、2次元線形微分方程式の分岐図を作ることができる[62]。
非線形系
編集問題の微分方程式が非線形系の場合、解析的な解が得られることはまれである[63]。しかし、非線形系であっても平衡点を求めることなら可能である[3]。そして、線形系の平衡点に対する安定判別法を非線形の平衡点に対する安定性判別に応用することはできる[64]。1つは、平衡点周りで線形化する方法である。
下記のような一般的な自励系的微分方程式が与えられているとする。
この微分方程式の平衡点を xe とする。xe を原点とする新たな変数を y として導入すると、x = xe + y である。f が滑らかであれば、f(xe + y) を xe 周りでテーラー展開し、y の2次以上のオーダーの項を無視することで、

という、平衡点近傍で線形近似した微分方程式を得ることができる[65]。ここで、Df(xe) は次のような xe についての f のヤコビ行列である。

A = Df(xe) と書き換えれば、近似した微分方程式は上記の線形系とまったく同じである[66]。
そして、平衡点 xe のヤコビ行列 Df(xe) の全ての固有値の実部が零ではない場合、そのような平衡点 xe を双曲型平衡点という[66]。もし平衡点 xe が双曲型平衡点であれば、ハートマン・グロブマンの定理によって、元の非線形微分方程式とそれを線形近似して得られた微分方程式の解は xe の近傍で位相共役であることが知られている[67]。言い換えれば、線形近似の方程式の解は xe の近傍で元の方程式の解と質的に同じである[68]。
一方で、平衡点 xe のヤコビ行列 Df(xe) の全ての固有値の実部が零(純虚数)の場合、そのような平衡点 xe を楕円型平衡点という[69]。楕円型平衡点は一般的な微分方程式ではまれだが、ハミルトン力学系では珍しくない[69]。2次元線形系であれば、楕円型平衡点とは渦心点を指す[70]。しかし一般的には、楕円型平衡点の近傍の解が閉曲線となることは成り立たず、楕円型平衡点の近傍の解の挙動は複雑である[71]。
非線形微分方程式のある平衡点が双曲型であれば、ハートマン・グロブマンの定理により、その平衡点周りで線形近似した微分方程式によって安定性を正確に判別することができる[67]。また、平衡点 xe が双曲型であるか否かにかかわらず、Df(xe) の固有値が少なくとも1つ以上の固有値が正であれば、xe が不安定であることも分かる[72]。以上をまとめると、非線形系の平衡点についてもヤコビ行列の固有値にもとづいて次のように判別できる[73]。
- 平衡点 xe のヤコビ行列 Df(xe) の全ての固有値の実部が負の値であるとき、xe は漸近安定。
- 平衡点 xe のヤコビ行列 Df(xe) の少なくとも1つ以上の固有値が正のとき、xe は不安定。
しかし、平衡点のヤコビ行列の固有値の実部が負の値と零の値から成るとき、ヤコビ行列だけから安定性を判別することはできない[72]。非双曲型平衡点に対して安定性を議論する一般的方法を与えるのは中心多様体による方法である[74]。次のような微分方程式系が与えられているとする[75]。


ここで、



であり、A は全ての固有値の実部が零であるような c 次正方行列、B は全ての固有値の実部が負の値であるような s 次正方行列である[75]。この場合、平衡点は原点 o に平行移動されている[76]。このような微分方程式系に対しては、平衡点を通る中心多様体およびその中心多様体に制限されたベクトル場を平衡点近傍で計算することで安定性を判別できる[77]。これらを解析的に厳密解を求めるのは難しいが、中心多様体の定理によって好きな精度で近似的に計算できることが保証される[78]。
ヤコビ行列の固有値を調べることなく平衡点の安定性を判別する方法としては、リアプノフ関数を見つける方法がある[79]。平衡点 xe を含む開集合 U 上に定義された実数値関数 L(x) が条件
- L(xe) = 0 かつ x ≠ xe ならば L(x) > 0
- U − {xe} 上で dL(x)/dt ≤ 0
を満たすとき、L(x) をリアプノフ関数という[80]。条件2の代わりに、
- U − {xe} 上で dL(x)/dt < 0
を満たすとき、L(x) を狭義リアプノフ関数という[80]。平衡点 xe に対してリアプノフ関数が存在するときは、xe はリアプノフ安定である[81]。平衡点 xe に対して狭義リアプノフ関数が存在するときは、xe は漸近安定である[81]。ただし、リアプノフ関数を見つける一般的で決まった方法はなく、発見的に試行錯誤して探すしかない[82]。
写像の「平衡点」
編集一般に、相空間の1点 x ∈ Rn を Rn から Rn へ写す写像 f (x) の n 回反復 f n(x) を考えることで、離散的な時間 n ∈ Z の力学系が定まる[83]。このような離散的力学系に対して f (xe) = xe を満たす xe を不動点という[84]。不動点は任意の時間 n に対して f n(xe) = xe を満たす[85]。
不動点 xe では離散的力学系の解軌道は xe に留まり続けることを意味し、写像の不動点と微分方程式の平衡点は同じような性質を持つ[85]。微分方程式の平衡点と同様に、写像の不動点もまた離散的力学系において中心的役割を担う[86]。微分方程式については「平衡点」と呼び、写像については「不動点」と呼び、それぞれを呼び分けることもあれば[87]、これら2つをまとめて「不動点」や「固定点」や「平衡点」と呼ぶこともある[88]。
出典
編集- ^ Hirsch, Smale & Devaney 2007, p. 201.
- ^ 今・竹内 2018, p. 108; ウィギンス 2013, p. 6; 上田 2008, p. 27; Strogatz 2015, p. 22.
- ^ a b c 今・竹内 2018, p. 108.
- ^ 桑村 2015, pp. 26–29.
- ^ 今・竹内 2018, p. 3.
- ^ a b ウィギンス 2013, p. 1.
- ^ 丹羽 2008, p. 28.
- ^ 丹羽 2008, p. 26; 上田 2008, p. 27.
- ^ 齋藤 2004, p. 12.
- ^ 上田 2008, p. 27.
- ^ 今・竹内 2018, p. 107.
- ^ & 桑村 2015, p. 20.
- ^ Strogatz 2015, p. 353.
- ^ 齋藤 2004, p. 49.
- ^ a b 齋藤 2004, p. 136.
- ^ Hirsch, Smale & Devaney 2007, p. 163.
- ^ 桑村 2015, p. 34.
- ^ 船越 2008, p. 104.
- ^ a b 船越 2008, p. 109.
- ^ Hirsch, Smale & Devaney 2007, p. 2.
- ^ 船越 2008, p. 108; ウィギンス 2013, p. 6.
- ^ 丹羽 2008, p. 25.
- ^ 松葉 2011, pp. 49, 72.
- ^ ブラウン 2012, p. 138.
- ^ Strogatz 2015, p. 141.
- ^ a b c Strogatz 2015, p. 155.
- ^ アリグッド;サウアー;ヨーク 2012, p. 105.
- ^ アリグッド;サウアー;ヨーク 2012, p. 95.
- ^ a b 松葉 2011, p. 36; アリグッド;サウアー;ヨーク 2012, p. 95.
- ^ Strogatz 2015, p. 156.
- ^ 桑村 2015, p. 29.
- ^ Strogatz 2015, p. 142.
- ^ アリグッド;サウアー;ヨーク 2012, p. 105; Strogatz 2015, p. 142.
- ^ 松葉 2011, pp. 36, 50.
- ^ ブラウン 2012, pp. 142, 144–145.
- ^ 今・竹内 2018, p. 91.
- ^ 今・竹内 2018, p. 91; Hirsch, Smale & Devaney 2007, p. 132.
- ^ アリグッド;サウアー;ヨーク 2012, p. 99.
- ^ a b Hirsch, Smale & Devaney 2007, p. 82.
- ^ ブラウン 2012, pp. 145, 148.
- ^ 齋藤 2004, p. 129; 上田 2008, pp. 35–36.
- ^ Hirsch, Smale & Devaney 2007, p. 27.
- ^ Hirsch, Smale & Devaney 2007, pp. 37–47; Strogatz 2015, pp. 143–150.
- ^ 上田 2008, p. 36; 齋藤 2004, pp. 129–130.
- ^ 松葉 2011, p. 53; 桑村 2015, p. 36.
- ^ a b c 松葉 2011, p. 53.
- ^ a b 桑村 2015, pp. 31, 36; Strogatz 2015, p. 147.
- ^ 上田 2008, pp. 34, 36; Strogatz 2015, p. 148.
- ^ 上田 2008, p. 36; 齋藤 2004, pp. 129–130; ブラウン 2012, p. 199.
- ^ ブラウン 2012, p. 199.
- ^ 上田 2008, p. 36.
- ^ 上田 2008, p. 37; 齋藤 2004, pp. 129–130; ブラウン 2012, p. 199.
- ^ 上田 2008, p. 37; 松葉 2011, p. 54; 桑村 2015, p. 36.
- ^ a b 松葉 2011, p. 54.
- ^ a b Hirsch, Smale & Devaney 2007, p. 45; 今・竹内 2018, p. 117; 桑村 2015, pp. 31, 36.
- ^ 上田 2008, p. 37; 齋藤 2004, pp. 129–130.
- ^ 上田 2008, p. 37; Strogatz 2015, p. 147.
- ^ Strogatz 2015, p. 147.
- ^ Hirsch, Smale & Devaney 2007, p. 61; Strogatz 2015, p. 150; 松葉 2011, p. 54; 今・竹内 2018, p. 118.
- ^ Hirsch, Smale & Devaney 2007, pp. 59–60.
- ^ Strogatz 2015, pp. 150–151; 松葉 2011, pp. 53–54; Hirsch, Smale & Devaney 2007, p. 60; 今・竹内 2018, p. 119.
- ^ Hirsch, Smale & Devaney 2007, p. 62.
- ^ Strogatz 2015, p. 161.
- ^ アリグッド;サウアー;ヨーク 2012, p. 112.
- ^ 松葉 2011, p. 49.
- ^ a b 今・竹内 2018, p. 112.
- ^ a b Strogatz 2015, p. 171.
- ^ ウィギンス 2013, p. 236.
- ^ a b 柴山 2016, p. 41.
- ^ 伊藤 1998, p. 77.
- ^ 伊藤 1998, pp. 78–79.
- ^ a b アリグッド;サウアー;ヨーク 2012, p. 113.
- ^ 桑村 2015, p. 37; アリグッド;サウアー;ヨーク 2012, pp. 113–114.
- ^ 松葉 2011, p. 238.
- ^ a b ウィギンス 2013, p. 194.
- ^ 松葉 2011, p. 239.
- ^ ウィギンス 2013, pp. 194–198; 桑村 2015, pp. 38–41; 松葉 2011, pp. 238–243.
- ^ ウィギンス 2013, p. 196.
- ^ 桑村 2015, pp. 65–66.
- ^ a b Hirsch, Smale & Devaney 2007, p. 199.
- ^ a b アリグッド;サウアー;ヨーク 2012, p. 122.
- ^ Hirsch, Smale & Devaney 2007, p. 199; 松葉 2011, p. 216.
- ^ 松葉 2011, pp. 26–27.
- ^ ウィギンス 2013, p. 9.
- ^ a b 松葉 2011, p. 32.
- ^ Hirsch, Smale & Devaney 2007, p. 338.
- ^ Hirsch, Smale & Devaney 2007, p. 32; 松葉 2011.
- ^ Strogatz 2015, pp. 19, 382; ウィギンス 2013, pp. 6, 9; 松葉 2011, p. 32; 今・竹内 2018, pp. 108, 216.
参照文献
編集- 今 隆助・竹内 康博、2018、『常微分方程式とロトカ・ヴォルテラ方程式』初版、共立出版 ISBN 978-4-320-11348-0
- 桑村 雅隆、2015、『パターン形成と分岐理論 ―自発的パターン発生の力学系入門』初版、共立出版〈シリーズ・現象を解明する数学〉 ISBN 978-4-320-11004-5
- 丹羽 敏雄、2008、『力学系』オンデマンド版、紀伊國屋書店〈紀伊國屋数学業書21〉 ISBN 978-4-320-11348-0
- S. ウィギンス、丹羽 敏雄(監訳)、今井 桂子・田中 茂・水谷 正大・森 真(訳)、2013、『非線形の力学系とカオス』新装版、丸善出版 ISBN 978-4-621-06435-1
- 上田 睆亮、2008、『カオス現象論』初版、コロナ社〈現代非線形科学シリーズ12〉 ISBN 978-4-339-02611-5
- Steven H. Strogatz、田中 久陽・中尾 裕也・千葉 逸人(訳)、2015、『ストロガッツ 非線形ダイナミクスとカオス ―数学的基礎から物理・生物・化学・工学への応用まで』、丸善出版 ISBN 978-4-621-08580-6
- Morris W. Hirsch; Stephen Smale; Robert L. Devaney、桐木 紳・三波 篤朗・谷川 清隆・辻井 正人(訳)、2007、『力学系入門 原著第2版 ―微分方程式からカオスまで』初版、共立出版 ISBN 978-4-320-01847-1
- 船越 満明、2008、『カオス』初版、朝倉書店〈シリーズ 非線形科学入門3〉 ISBN 978-4-254-11613-7
- M. ブラウン、一樂 重雄・河原 正治・河原 雅子・一樂 祥子(訳)、2012、『微分方程式 下 ―その数学と応用』、丸善出版 ISBN 978-4-621-06570-9
- K.T.アリグッド;T.D.サウアー;J.A.ヨーク、津田 一郎(監訳)、星野 高志・阿部 巨仁・黒田 拓・松本 和宏(訳)、2012、『カオス 第2巻 力学系入門』、丸善出版 ISBN 978-4-621-06279-1
- 松葉 育雄、2011、『力学系カオス』第1版、森北出版 ISBN 978-4-627-15451-3
- 齋藤 利弥、2004、『力学系入門』復刊版、朝倉書店 ISBN 4-254-11722-1
- 伊藤 秀一、1998、『常微分方程式と解析力学』初版、共立出版〈共立講座 21世紀の数学 11〉 ISBN 4-320-01563-0
- 柴山 允瑠、2016、「重点解説 ハミルトン力学系 ―可積分系とKAM理論を中心に」、『臨時別冊・数理科学2016年12月』(SGCライブラリ 130)、サイエンス社、ISSN 0386-8257
外部リンク
編集- Eugene M. Izhikevich (ed.). "Equilibrium". Scholarpedia.